
728x90
반응형
본인의 Github
https://github.com/JeongMinHyeok/Kalman_Filter
JeongMinHyeok/Kalman_Filter
Contribute to JeongMinHyeok/Kalman_Filter development by creating an account on GitHub.
github.com

칼만필터의 전체 계산과정
칼만필터 알고리즘 구조
- 입력과 출력이 하나씩인 간단한 구조
- 측정값(zk)이 입력되면 내부처리 후 추정값 (x hat k) 출력
- 내부계산은 총 네 단계
- 아래첨자 k는 칼만필터 알고리즘이 반복해서 수행된다는 의미
- 위첨자 '-'는 중요한 의미, '-'첨자가 붙으면 이름이 같아도 전혀 다른 변수를 의미
칼만 필터 알고리즘의 계산과정
계산과정 단계별 설명
- 1단계 (추정값 및 오차 공분산 예측단계)
- 2 ~ 4단계에서 사용하는 두 변수 x hat k, P-k 계산
- 위 첨자 '-'는 예측값을 의미
- 예측단계의 계산식은 시스템모델과 밀접한 관련
- 2단계 (칼만이득 계산단계)
- 칼만이득(Kk) 계산
- 변수 P-k는 앞 단계에서 계산한 값 사용
- H, R은 알고리즘 밖에서 미리 결정되는 값
- 3단계 (추정값 계산단계)
- 입력된 측정값(zk)으로 추정값(x hat k) 계산
- 저주파 통과 필터와 관련된 계산식
- 변수 x hat - k는 1단계에서 계산한 값
- 4단계 (오차 공분산 계산 단계)
- 오차 공분산은 추정값이 얼마나 정확한지 알려주는 척도
- 오차 공분산 검토하여 계산한 추정값을 쓸지 버릴지 결정
알고리즘에 등장하는 변수
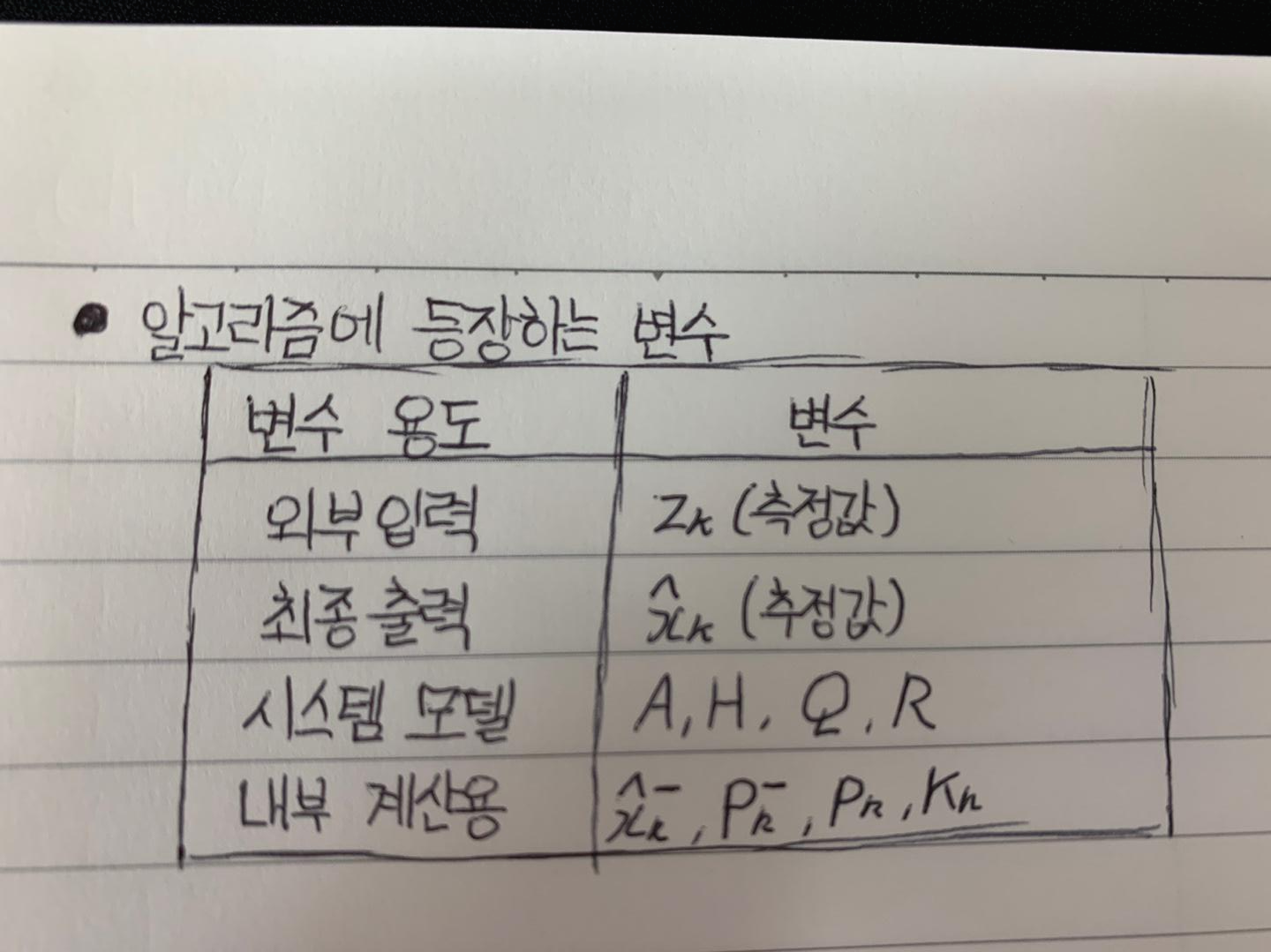
- 외부입력 : zk(측정값)
- 최종출력 : x hat k (추정값)
- 시스템 모델 : A, H, Q, R
- 내부 계산용 : x hat - k, P hat - k, Pk, Kk
- A, H, Q, R은 구현 전에 미리 결정
- 대상 시스템과 칼만필터 사용목적에 따라 설계자가 사전에 확정
- 이 값을 어떻게 선정하느냐에 따라 칼만필터의 성능이 달라짐
- 칼만필터의 성능은 시스템 모델이 실제 시스템과 가까울수록 좋음
칼만필터 알고리즘 의미 별 분류 (예측과정과 추정과정)
- 예측과정
- 1단계가 여기에 해당
- 직전 추정값(x hat k-1)과 오차공분산(Pk-1)이 입력되면 최종결과로 예측값(x hat - k, P - k)을 출력
- 예측값은 추정과정에 사용
- 해당 단계에서 사용하는 시스템 모델 변수는 A와 Q
- 추정과정
- 2 ~ 4단계가 여기에 해당
- 추정과정의 결과물은 추정값(x hat k)과 오차공분산(Pk)
- 입력값은 예측과정의 예측값과 측정값(zk) 사용
- 사용하는 시스템 모델 변수는 H와 R
정리 (의미 분류 관점으로)
- 시스템 모델(A, Q)을 기초로 다음 시각에 상태와 오차 공분산 예측 (x hat - k, P - k)
- 측정값과 예측값의 차이를 보정하여 새로운 추정값 계산 (x hat k, Pk)
- 칼만필터의 최종결과물
- 위의 두 과정 반복
728x90
'Minding's Reading > 칼만필터는 어렵지 않아' 카테고리의 다른 글
| [칼만필터는 어렵지않아/Python] CH.06 예측과정 (0) | 2021.06.24 |
|---|---|
| [칼만필터는 어렵지않아 / Python] CH.05 추정과정 (0) | 2021.06.23 |
| [칼만필터는 어렵지않아 / Python] CH.03 저주파 통과 필터 (0) | 2021.06.21 |
| [칼만필터는 어렵지 않아/Python] CH.02 이동평균 필터 (0) | 2021.06.19 |
| [칼만필터는 어렵지 않아] CH.01 평균필터 (2) | 2021.06.16 |